Haptic compass belt 🧭
I’ve always wanted to build a compass belt! The idea is to attach a couple of vibration motors to a belt, use a compass sensor to find north, and then to let the motor that points north vibrate!
Wearing such a device seems to give some people a new sense of direction, so I was super curious to try it!
In this post, I want to document how I built one, hoping to give other people who want to build one in the future a head start! My design is cheap (the parts cost around 15 EUR) and has a straightforward design.

Overall design
The simplest implementation I could think of was to use a microcontroller to control the vibration motors, and then connect it to a smartphone via USB, to receive commands.
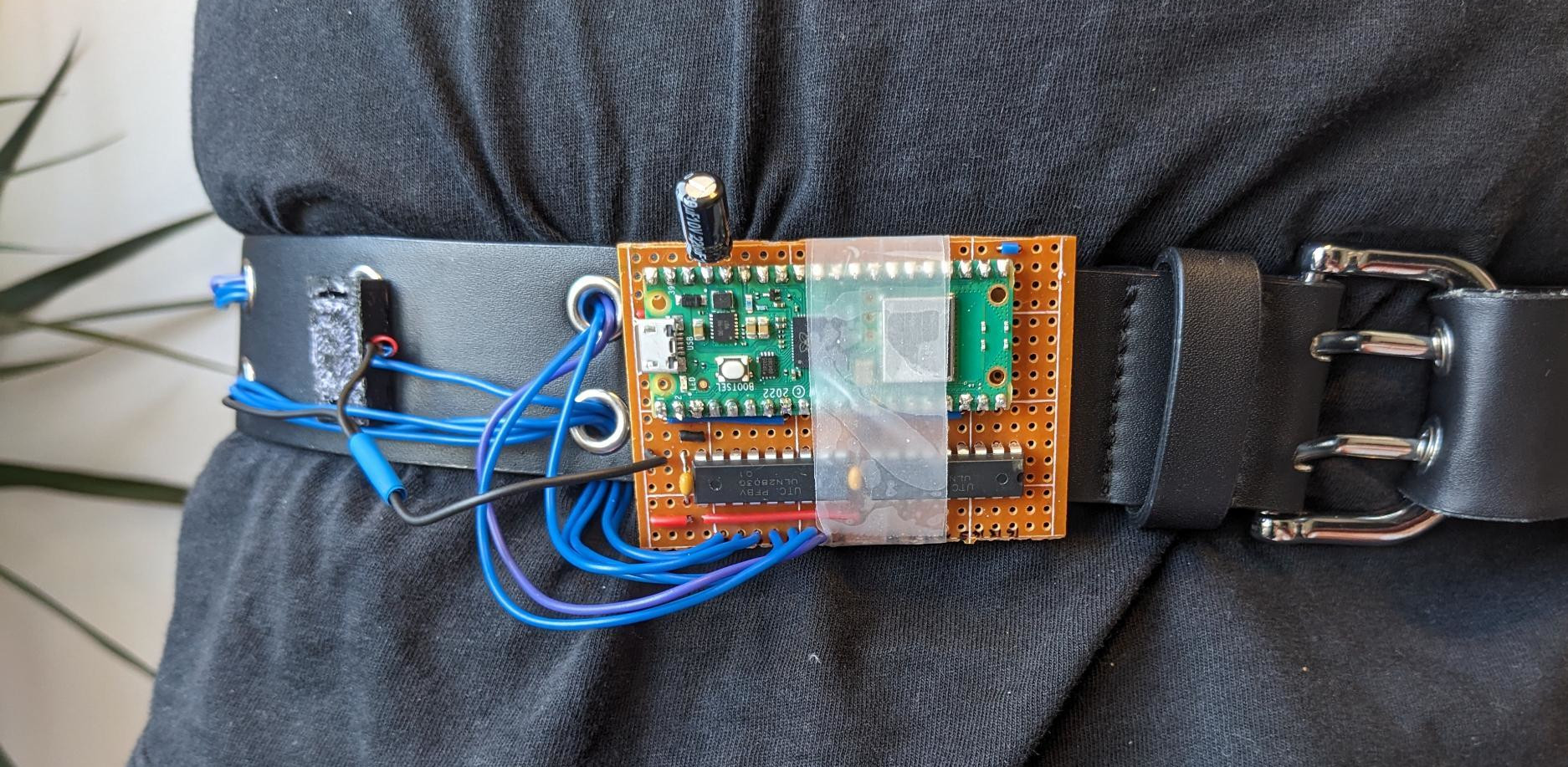
This means that we don’t an extra magnetic sensor, and no battery pack, because we can use the smartphone as a power supply. This is the finished compass belt in its current form:

Hardware
Belt
I found this belt at a clothing store a couple of weeks ago, and immediately thought that it might be a neat basis for this project! Any belt with double rows of eyelets all the way along the belt should work. If you don’t find such a belt, you’d need another way to mount the motors, and to route the cables.
Motors
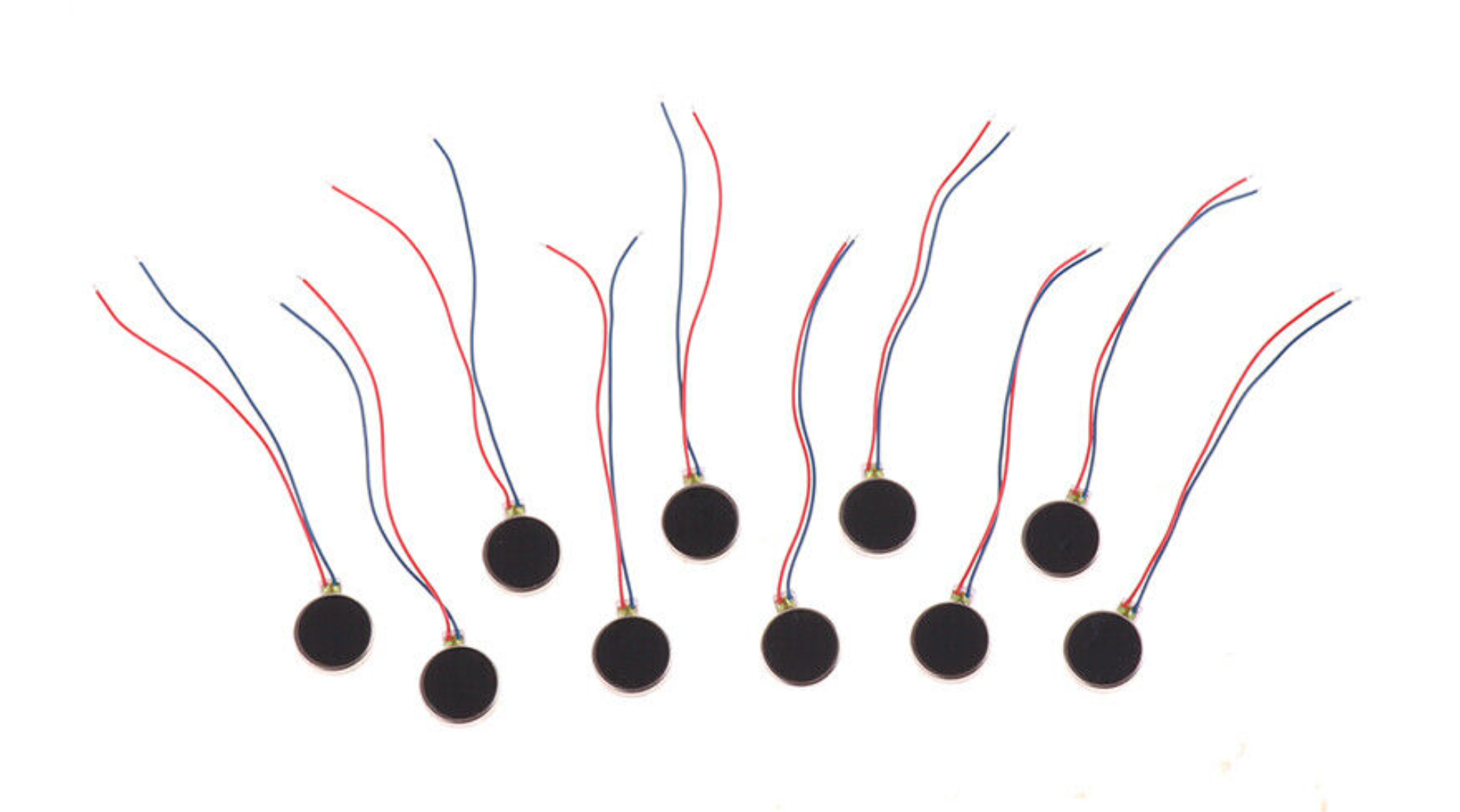
I used coin vibration motors with a diameter of 10 mm, a nominal voltage of 3 V, and a nominal current of 70 mA. These “closed” motors have the advantage that they don’t have external moving parts you need to look out for.
Board
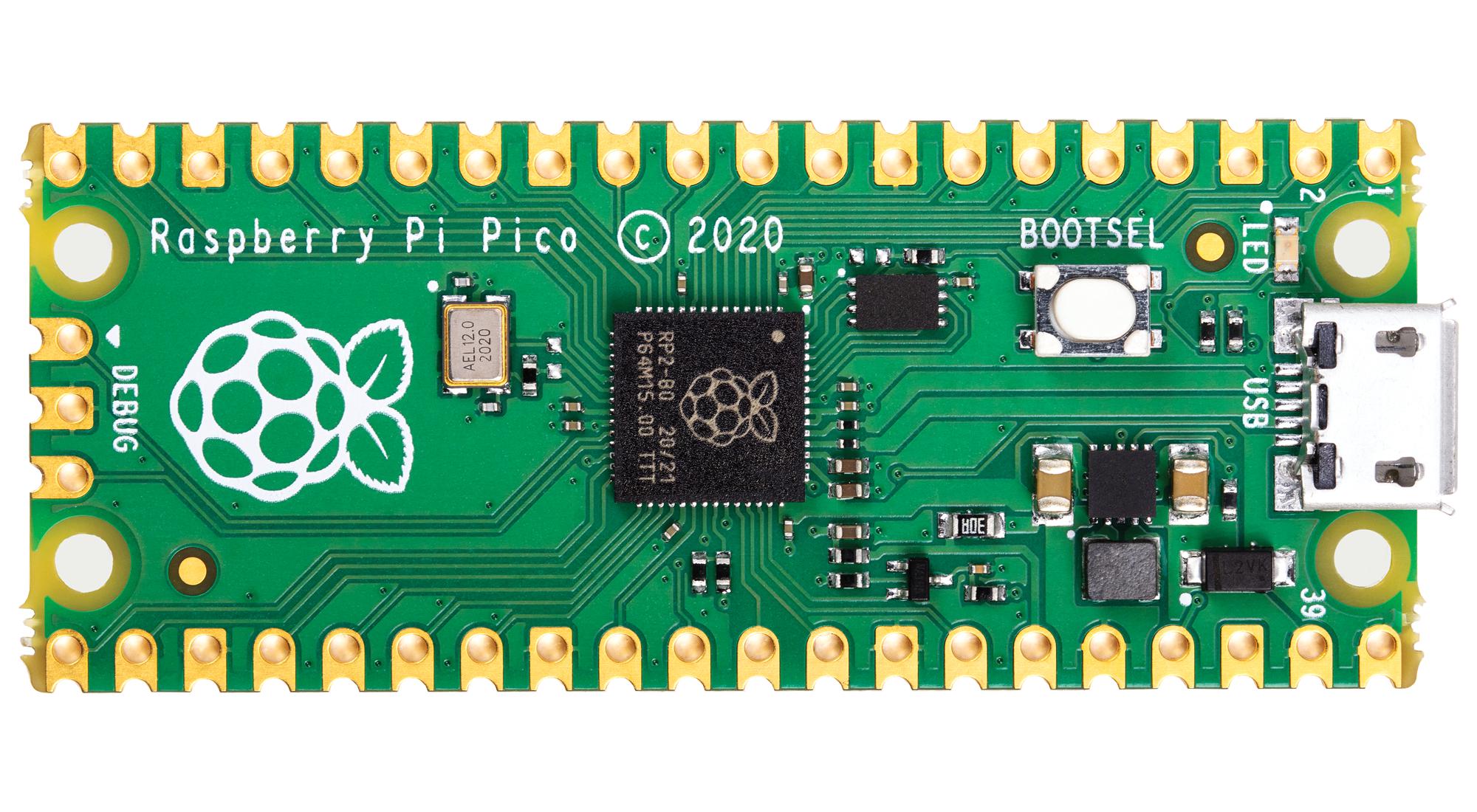
The electronics of the belt are based on a Raspberry Pi Pico, a tiny, cheap microcontroller with lots of output pins.
It’s not a good idea to attach the motors to the output pins of the Pico directly, as they are not designed to provide enough current.
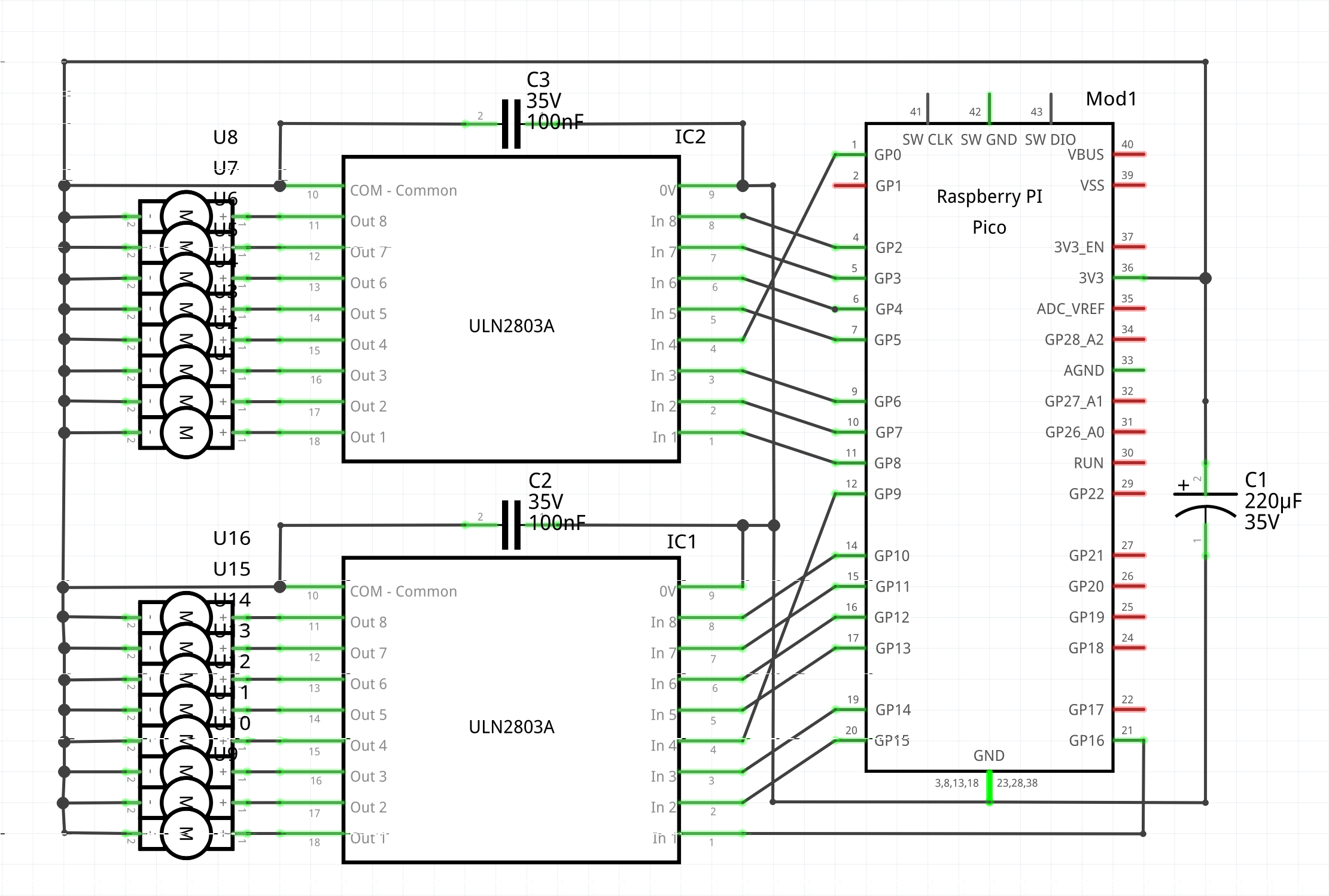
So I asked around a bit, and Kenneth and Electronic Eel suggested using a transistor array chip called the ULN2803a (which is similar to the ULN2008A, but has 8 input and output pins). The ULN can be used to connect and disconnect the motors to the ground on demand. They also already contain a “flyback diode”, which will prevent the transistors from being damaged when the motors wind down.
Electronic Eel also helped me with finding suitable capacitors: One 100 nF capacitor acting as a bypass capacitor per ULN, and a bigger one (I used 220 µF) for stabilizing the voltage of the Pico itself.
I used the software Fritzing to design this circuit:
Fritzing also allowed me to translated the circuit into a design for stripboards, which gave me a much more stable result, compared to a solderless breadboard:
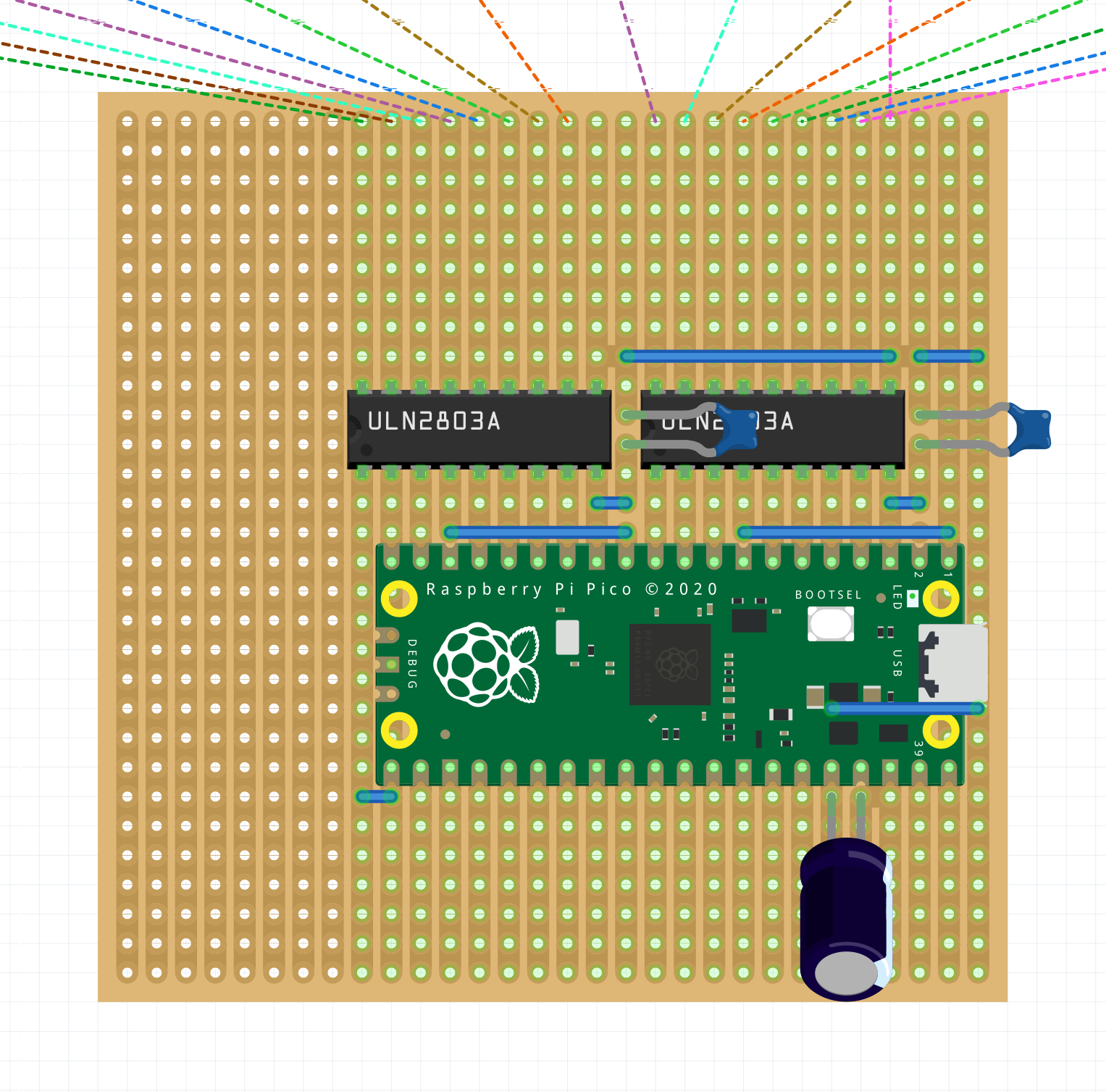
You can find the Fritzing file for both designs here: https://github.com/blinry/compass-belt-hardware
This was the first time I used a stripboard, and overall, it was a good experience! :) I was super anxious when putting it together, because it seemed easy to make mistakes, but in the end, it worked flawlessly on the first try!
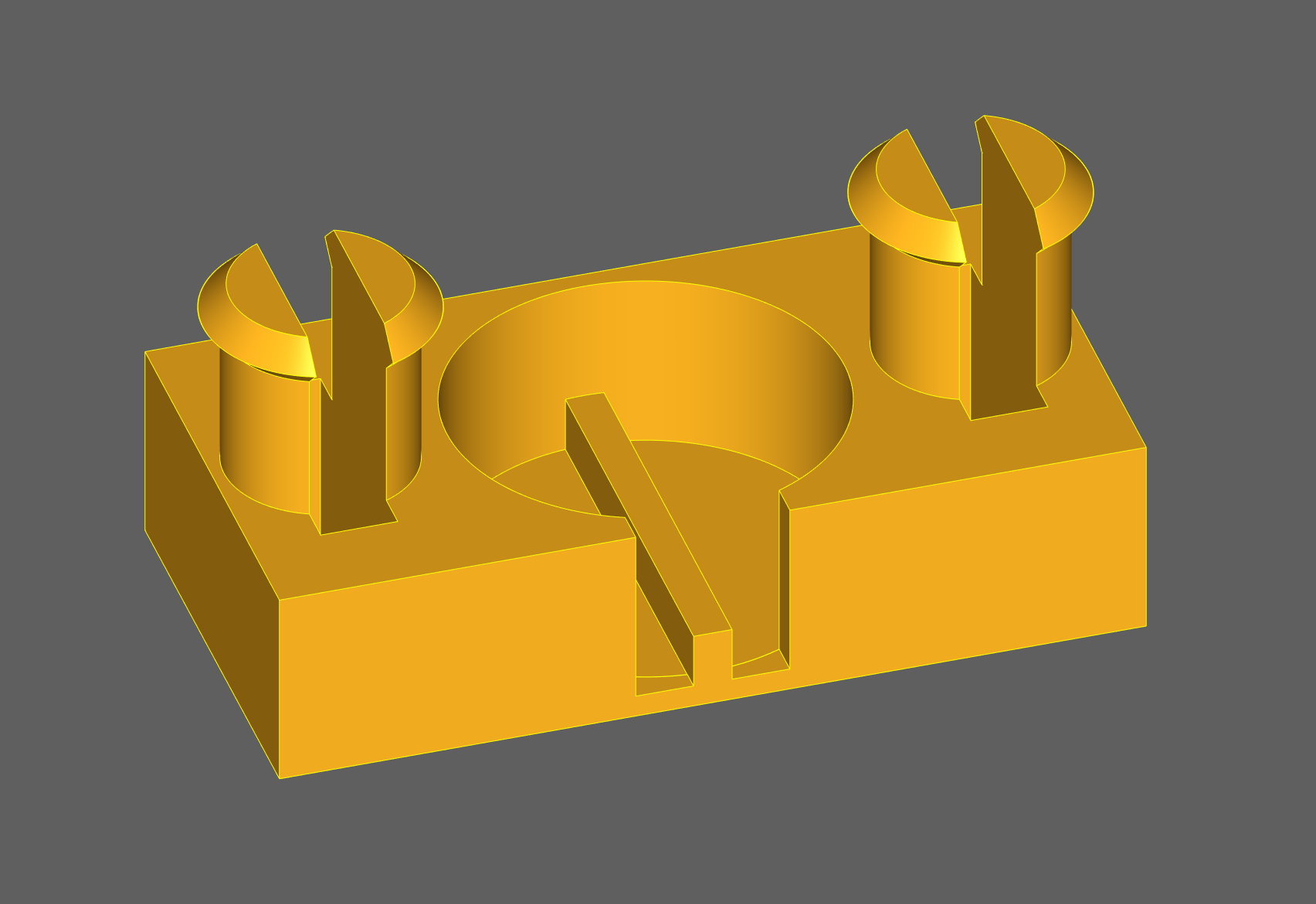
Motor clip
To attach the vibration motors to the belt, I designed parts which would house the motors and their thin cables, and clip to two of the belt’s eyelets. I used the Python library CadQuery to model this part in a parametric way. Quite neat!
I then printed one clip for each motor on a 3D printer.
I published the source code for the motor clips here: https://github.com/blinry/compass-belt-clip
Software
Firmware running on the belt
The Picos can be programmed using MicroPython or CircuitPython. Both would work for my prototype, but I picked MicroPython to be able to use the Picos’ Bluetooth features at a later point. To communicate with the attached Android phone, it suffices to use Python’s input() function, which will read text from the Serial connection via USB.
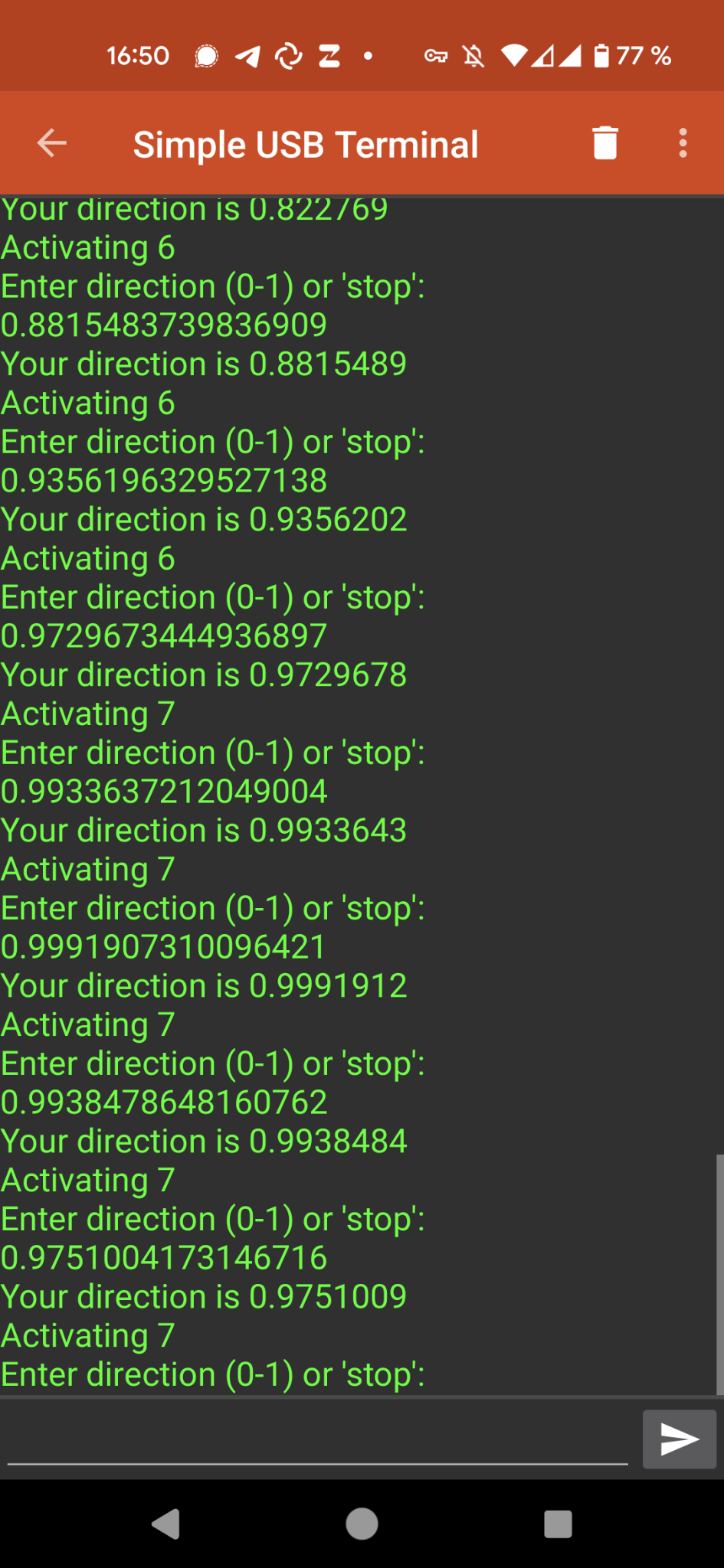
The firmware is pretty simple: It reads numbers between 0 and 1 from the serial connection via the USB cable connected to the Android phone, and then activates the matching motor. 0 means “at the front of the human”, 0.25 is right, 0.5 is back, 0.75 is left. Essentially, the angle is a clockwise “factor of tau”.
The MicroPython code has a list of motor positions and pin assignments baked in – if you want to use it with our belt, you have to modify the array at the top: https://github.com/blinry/compass-belt-firmware
I copied the firmware to the Pico using the following Linux command. Naming it main.py on the controller makes it auto-start this program after booting:
ampy -p /dev/ttyACM0 put firmware.py main.py
To test the firmware with my computer, I connected to it using this command (but other serial terminal emulators like picocom or minicom would also work):
python -m serial.tools.miniterm ACM0 115200
Android app
To send serial data over USB with Android, I originally envisioned a simple solution like “write a bash script and run it on Termux”. There is a termux-usb command which passes a file descriptur under which the USB device can be accessed to another program, and with a bit of work (like started by Querela), it seems possible to write software which uses this to write serial data. But I couldn’t get Querela’s code to work.
For testing purposes, I was already using Kai’s Simple USB Terminal, and I was delighted to find that Kai published a simplified open-source version of it, published under the MIT license.
So I forked it, and added a bit of code to the SerialService class, which permamently calculates the desired vibration angle (currently assuming the device is held upright in front of the person), and sends it to the board.
This seemed like the fastest way to get the job done. With more time, it’d be nice to write a cleaner app with additional features (like allowing the user to enter a GPS coordinate to guide them to). But because this was a weekly project, I needed something fast.
You can find my modified app here: https://github.com/blinry/compass-belt-app
My experiences
I’ve just built the belt this week, and taken a short walk with it, so I don’t have tons of experiences to share.
But I’m surprised by how strongly the vibration can be felt through the belt!
Also, I thought I might attach 16 motors to the belt – but I don’t think I could differentiate between them. The current 8 seem enough.
Here’s some things I’d try next:
- Extending the app to guide me to a certain GPS coordinate.
- Changing the calculation so that I can put the smartphon in my pocket (at a fixed, known angle?), instead of having to hold it in front of me.
- Later, maybe experimenting with an on-board magnetic sensor, so that I can twist the attached smartphone however I want?
- And it’d be great to get rid of the USB cable. If I attach a small battery to the Pico, I could probably communicate over Bluetooth.
